Resultados de latencia (I2C)
Se midió la latencia round-trip enviando 1000 mensajes a 100 kHz en cada par de plataformas.
Resumen comparativo
| Par | Frecuencia | n | Prom (ms) | p50 | p90 | p99 | σ | Min | Max | Outliers |
|---|---|---|---|---|---|---|---|---|---|---|
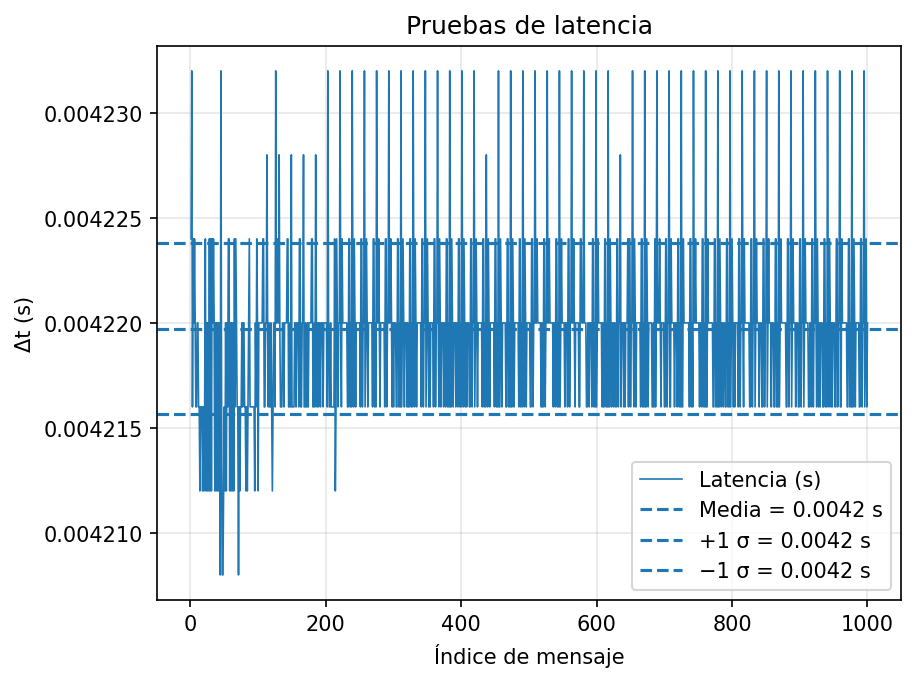
| Arduino ↦ RP2040 | 100 kHz | 1000 | 3.197 | 3.197 | 3.204 | 3.216 | 0.152 | 3.168 | 8.004 | 1 |
| RP2040 ↦ Arduino | 100 kHz | 1000 | 2.981 | 2.981 | 2.997 | 3.044 | 0.208 | 2.919 | 8.345 | 2 |
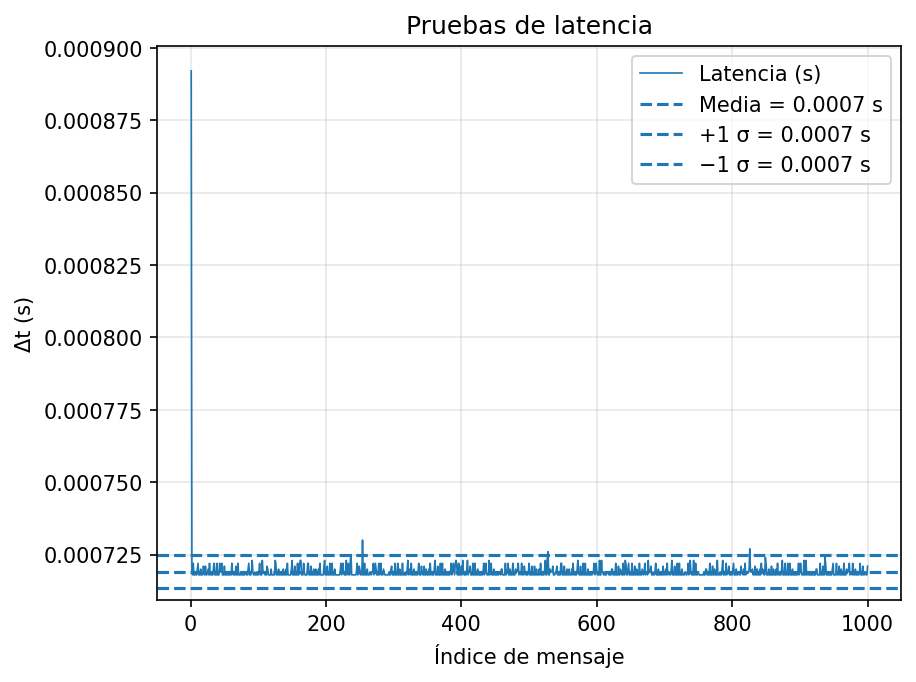
| Arduino ↦ ESP32 | 100 kHz | 1000 | 2.712 | 2.712 | 2.716 | 2.720 | 0.006 | 2.696 | 2.780 | 4 |
| ESP32 ↦ Arduino | 100 kHz | 1000 | 2.800 | 2.754 | 2.761 | 2.765 | 0.006 | 2.727 | 2.770 | 3 |
| ESP32 ↦ RP2040 | 100 kHz | 1000 | — | — | — | — | — | — | — | — |
| RP2040 ↦ ESP32 | 100 kHz | 1000 | — | — | — | — | — | — | — | — |
Detalle por par
Arduino ↦ RP2040

- Promedio ~3.2 ms.
RP2040 ↦ Arduino
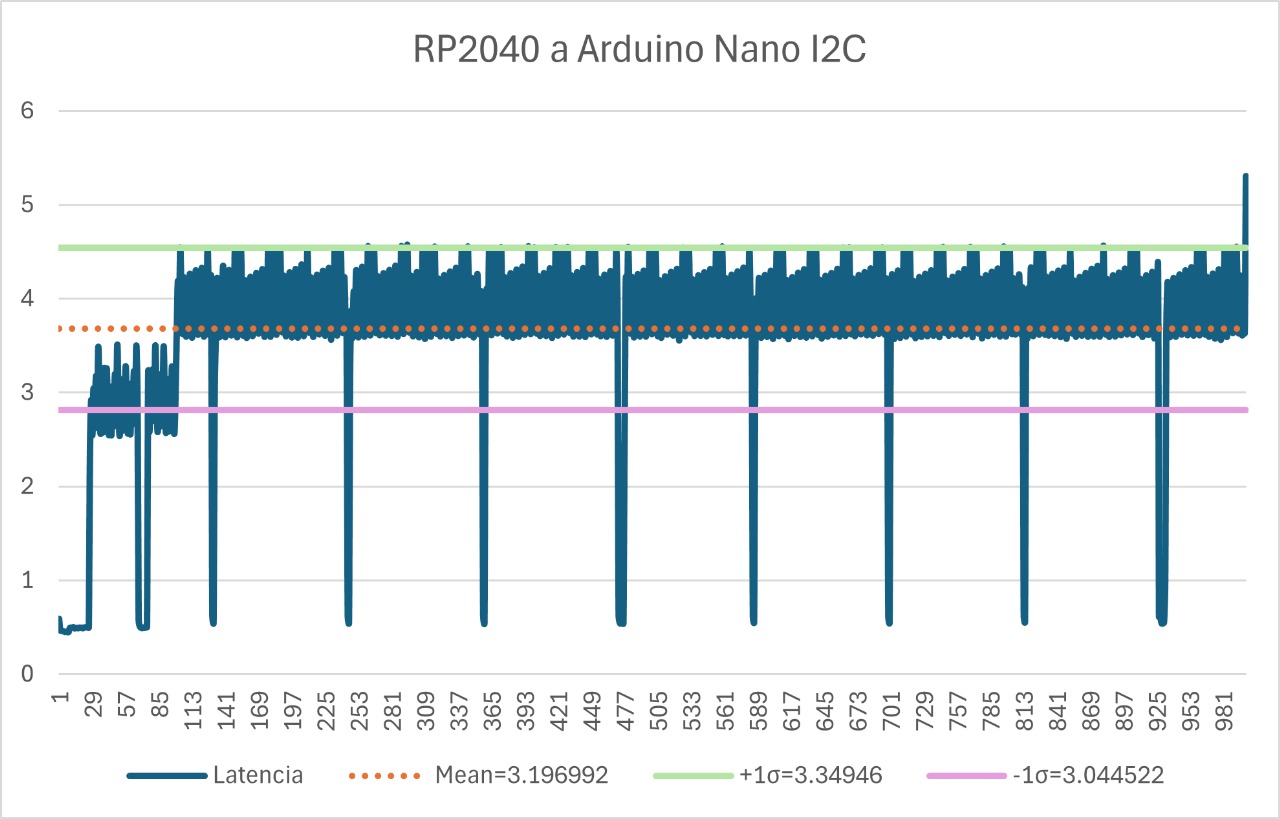
- Promedio ~2.98 ms.
ESP32 ↦ Arduino
- Promedio ~2.8 ms.
Arduino ↦ ESP32
- Promedio ~2.71 ms.
ESP32 ↦ RP2040

- Promedio ~3.2 ms.
RP2040 ↦ ESP32
- Promedio ~2.98 ms.
Discusión
- A
- B
- C